|
GECKO 1.0
Human-computer interface based on hand gesture recognition
|
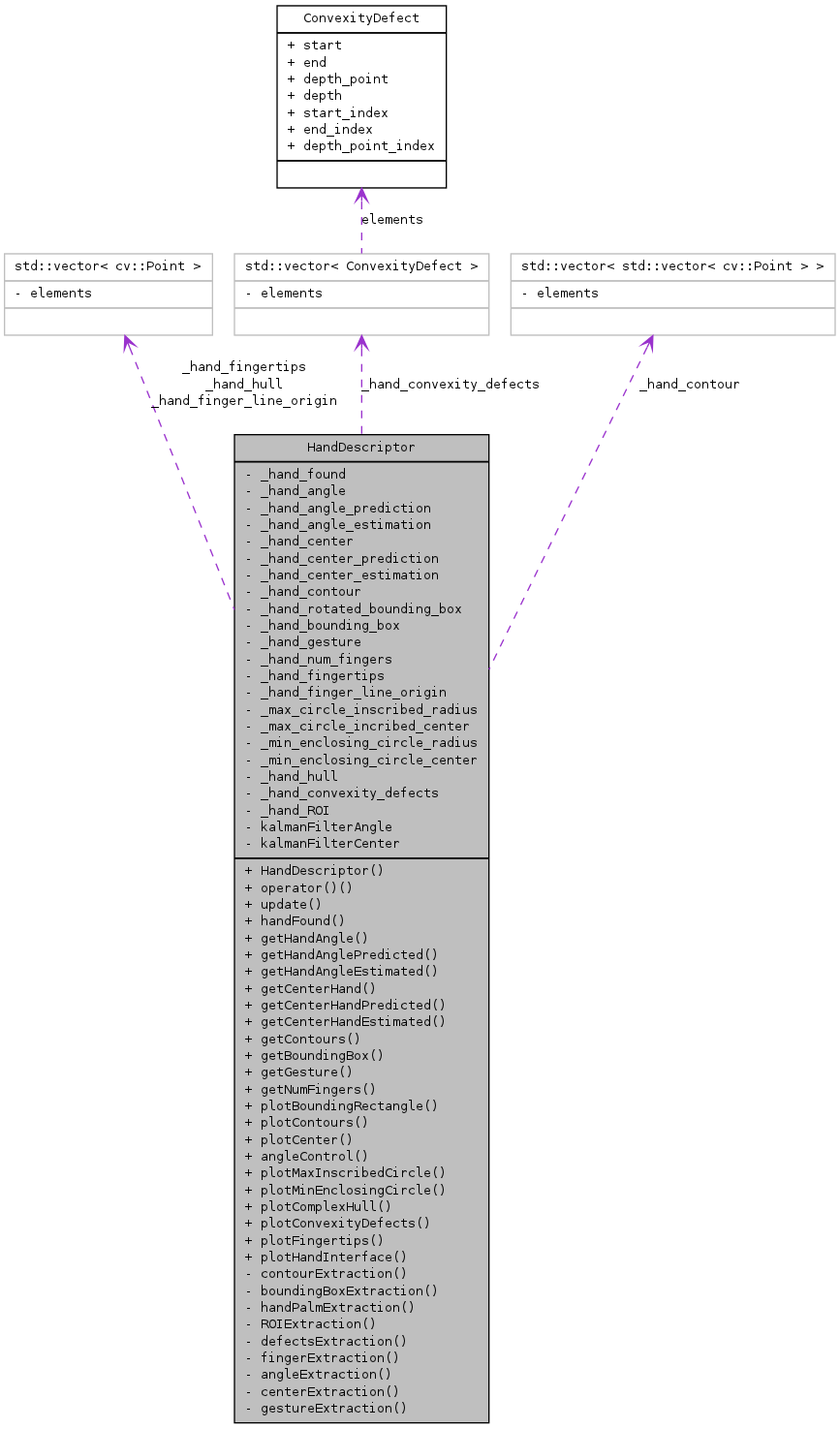
Finds the main characteristics of the hand from a binary image containing a hand silouette. More...
#include <HandDescriptor.h>
Public Member Functions | |
| HandDescriptor () | |
| Default constructor. | |
| void | operator() (const cv::Mat &skinMask) |
| Update the internal characteristics stored. | |
| void | update (const cv::Mat &skinMask) |
| Update the internal characteristics stored. | |
| bool | handFound () |
| Returns true if a hand was found. | |
| double | getHandAngle () |
| Returns the angle of the box enclosing the hand. | |
| double | getHandAnglePredicted () |
| Returns the angle of the box enclosing the hand predicted by the Kalman filter. | |
| double | getHandAngleEstimated () |
| Returns the angle of the box enclosing the hand estimated by the Kalman filter after updating the prediction with the actual value. | |
| cv::Point | getCenterHand () |
| Returns the position of the center of the hand. | |
| cv::Point | getCenterHandPredicted () |
| Returns the position of the center of the hand predicted by the Kalman filter. | |
| cv::Point | getCenterHandEstimated () |
| Returns the position of the center of the hand estimated by the Kalman filter after updating the prediction with the actual value. | |
| std::vector< std::vector < cv::Point > > | getContours () |
| Returns the contours of the detected hand. | |
| cv::Rect | getBoundingBox () |
| Returns the bounding box enclosing the detected hand. | |
| int | getGesture () |
| Returns the detected gesture. | |
| int | getNumFingers () |
| Returns the number of fingers found. | |
| void | plotBoundingRectangle (const cv::Mat &src, cv::Mat &dst, bool rotated=true) |
| Plots the rectangle around the hand on display. | |
| void | plotContours (const cv::Mat &src, cv::Mat &dst) |
| Plot the contours on display. | |
| void | plotCenter (const cv::Mat &src, cv::Mat &dst, bool show_corrected=true, bool show_actual=true, bool show_predicted=true) |
| Plot the center of the hand on display. | |
| void | angleControl (bool show_corrected=true, bool show_actual=true, bool show_predicted=true) |
| Prints the angle gauge on a separate window. | |
| void | plotMaxInscribedCircle (cv::Mat &src, cv::Mat &dst, bool show_center=true, cv::Scalar color=cv::Scalar(0, 255, 0), int thickness=1) |
| Prints the maximum inscribed circle: | |
| void | plotMinEnclosingCircle (cv::Mat &src, cv::Mat &dst, bool show_center=true, cv::Scalar color=cv::Scalar(255, 0, 255), int thickness=1) |
| Prints the minimum enclosing circle: | |
| void | plotComplexHull (cv::Mat &src, cv::Mat &dst, bool show_points=false, cv::Scalar color=cv::Scalar(0, 255, 255), int thickness=1) |
| Plot the hand complex hull: | |
| void | plotConvexityDefects (cv::Mat &src, cv::Mat &dst, bool draw_points=true) |
| Plot convexity defects: | |
| void | plotFingertips (cv::Mat &src, cv::Mat &dst, bool draw_lines=true, cv::Scalar color=cv::Scalar(255, 0, 0), int thickness=2) |
| Plot fingertip markers: | |
| void | plotHandInterface (cv::Mat &src, cv::Mat &dst) |
| Plot hand interface: | |
Private Member Functions | |
| void | contourExtraction (const cv::Mat &skinMask) |
| Extract the hand contours from a binary image containing hand candidates. | |
| void | boundingBoxExtraction () |
| Extracts the bounding boxes around the hand contour ( rectangle and rotated rectange) | |
| void | handPalmExtraction () |
| Finds the maximum inscribed circle of the hand contour, which describes the hand palm. | |
| void | ROIExtraction (const cv::Mat &src) |
| Extracts a mask of the region of interest in which the hand is contained. | |
| void | defectsExtraction () |
| Finds the convexity defects of the hand convex hull, that are used to find the fingers. | |
| void | fingerExtraction () |
| Extracts the number, position and orientation of the fingers. | |
| void | angleExtraction () |
| Extracts the hand angle from its bounding box and a Kalman Filter. | |
| void | centerExtraction () |
| Extracts the hand center and applies a Kalman Filter for improved stability. | |
| void | gestureExtraction () |
| Guesses the hand gesture using the hand characteristic data previouly found. | |
Private Attributes | |
| bool | _hand_found |
| Whether a hand was found or not: | |
| double | _hand_angle |
| Contains the actual angle of the box enclosing the hand. | |
| double | _hand_angle_prediction |
| Contains the predicted angle by the kalman filter. | |
| double | _hand_angle_estimation |
| Contains the corrected estimation by the kalman filter. | |
| cv::Point | _hand_center |
| Actual center of the hand. | |
| cv::Point | _hand_center_prediction |
| Predicted center of the hand by the kalman filter. | |
| cv::Point | _hand_center_estimation |
| Corrected estimation by the kalman filter. | |
| std::vector< std::vector < cv::Point > > | _hand_contour |
| Contours of the candidates to be a hand. | |
| cv::RotatedRect | _hand_rotated_bounding_box |
| Minimum RotatedRect enclosing the hand. | |
| cv::Rect | _hand_bounding_box |
| Minimum Rect enclosing the hand. | |
| int | _hand_gesture |
| Last detected gesture, coded as an integer (see constants for correspondence between integer and gesture) | |
| int | _hand_num_fingers |
| Number of fingers (visible) | |
| std::vector< cv::Point > | _hand_fingertips |
| Position of the fingertips. | |
| std::vector< cv::Point > | _hand_finger_line_origin |
| Position of the finger line origin points. | |
| double | _max_circle_inscribed_radius |
| Radius of the max. inscribed circle. | |
| cv::Point | _max_circle_incribed_center |
| Center of the max. incribed circle. | |
| float | _min_enclosing_circle_radius |
| Radius of the min. enclosing circle. | |
| cv::Point2f | _min_enclosing_circle_center |
| Center of the min. enclosing circle. | |
| std::vector< cv::Point > | _hand_hull |
| Complex hull of the hand. | |
| std::vector< ConvexityDefect > | _hand_convexity_defects |
| Convexity defects of the hand. | |
| cv::Mat | _hand_ROI |
| Mask containing ROI of the hand. | |
| cv::KalmanFilter | kalmanFilterAngle |
| Kalman filter for the angle of the box enclosing the hand. | |
| cv::KalmanFilter | kalmanFilterCenter |
| Kalman filter for the center of the hand. | |
Finds the main characteristics of the hand from a binary image containing a hand silouette.
To look for or to update the stored characteristics of the hand and its gesture, the update member or the operator () can be called. One can then know if a hand was found using handFound member, prior to retrieving any of the hand characteristics / gesture.
 1.7.4
1.7.4

