Deformable Object Perception and Manipulation
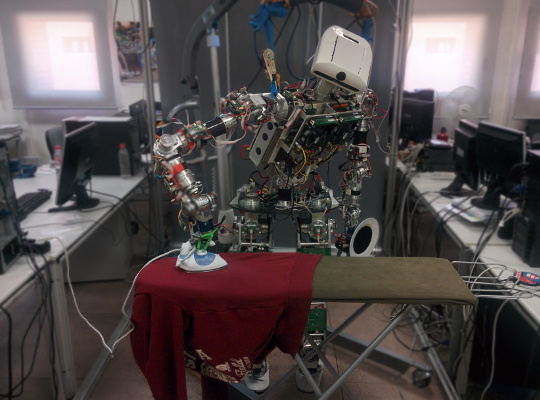
Assistive robots working on domestic environments need to be able to interact with garments and other deformable objects to perform some tasks. This line of research is devoted to developing methods for garment perception and manipulation applied to domestic laundry tasks such as ironing, folding or hanging garments, using Deep Learning techniques.