

Modular Robots
2014, Research and Bachelor's Thesis
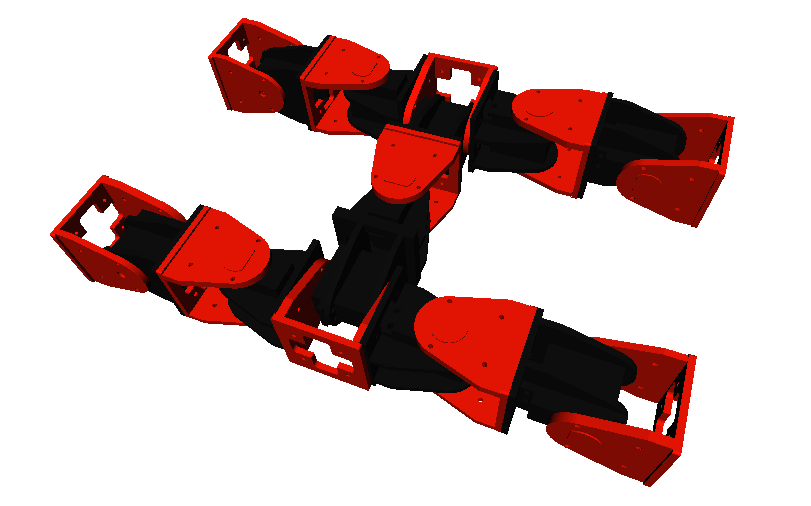
This project is the result of several months of research on modular robots that resulted in my Bachelor’s Thesis: a modular robot able to self-organize and coordinate using digital hormones, generating different locomotion gaits depending on the current robot morphology.
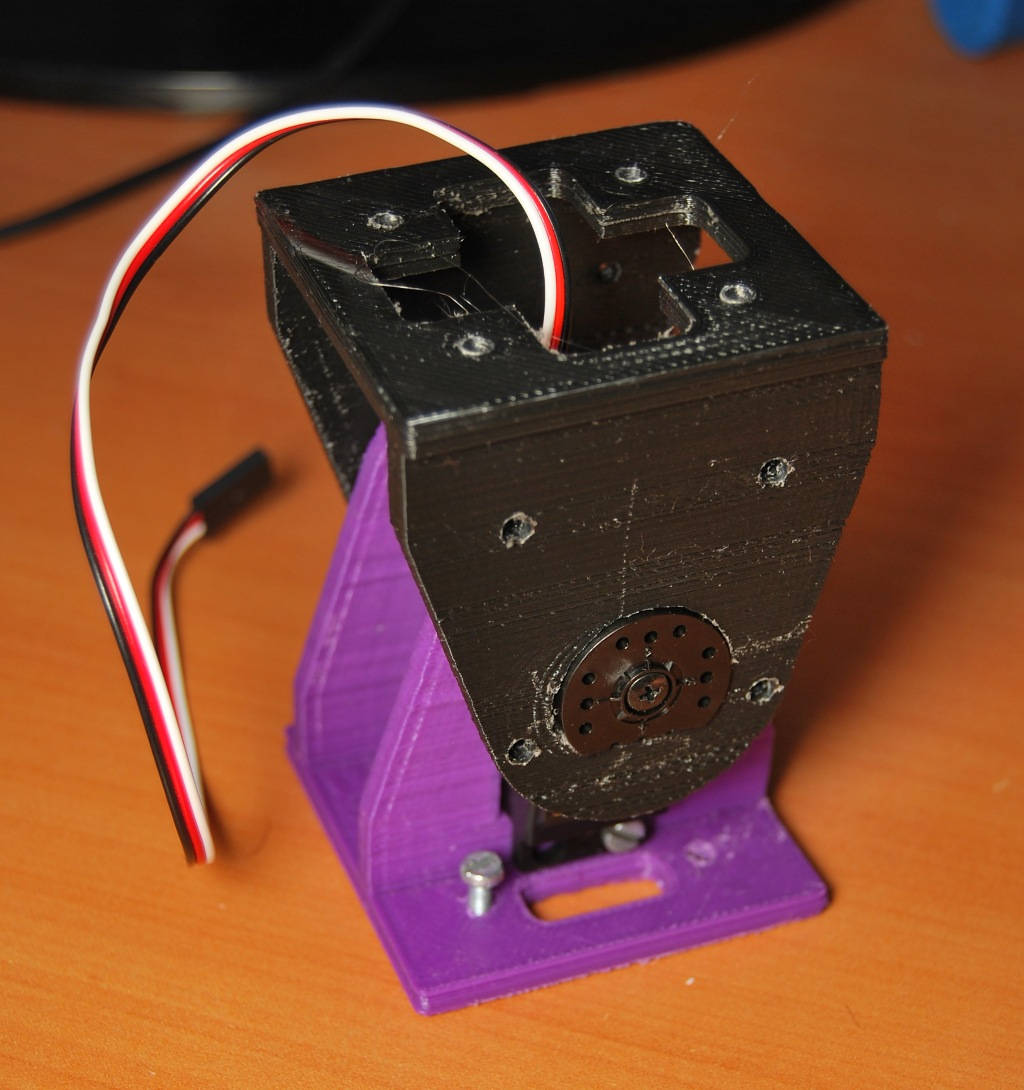
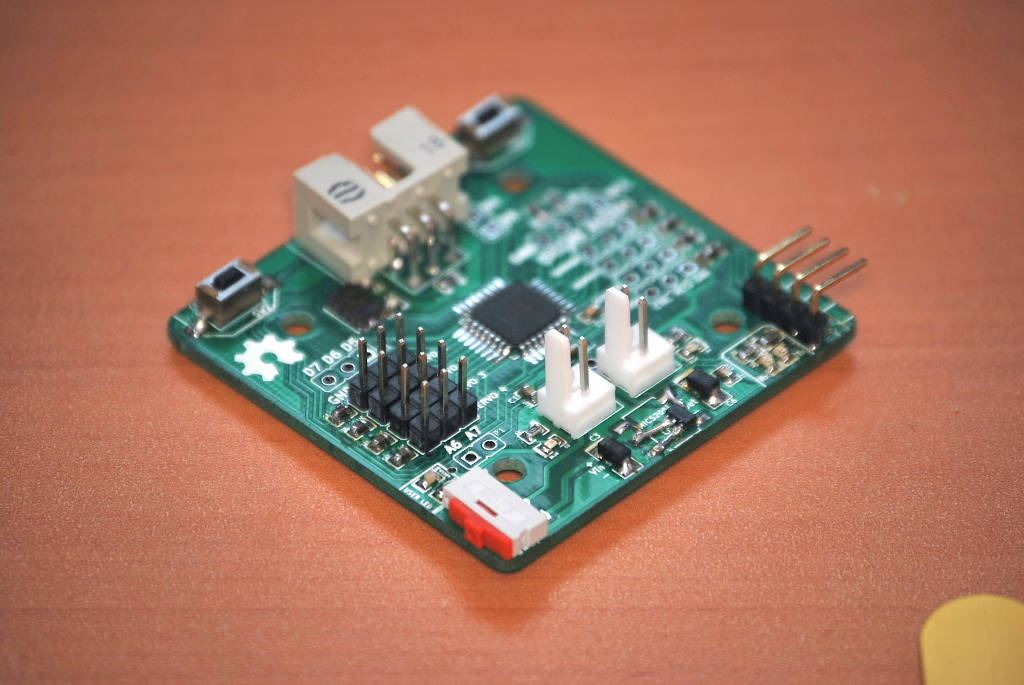
The robot was designed using OpenSCAD and 3D printed, and a custom PCB was designed and manufactured to control the robot. Gaits for different robot morphologies were learned using differential evolution in simulation, and then applied to the real robot, which selected the most suitable oscilations for each module in a decentralized manner, by communicating each module through digital hormones.
Project Documentation
Credits
- David Estevez